
In the world of modern automotive technology, the Controller Area Network (CAN bus) is a critical communication system. As a car repair expert at cardiagnostictool.store, I’m here to provide you with an in-depth yet simple explanation of the CAN bus, specifically focusing on its role in car Electronic Control Units (ECUs). This guide is designed to be your go-to resource for understanding CAN bus technology in car ECUs, going beyond basic introductions to offer a comprehensive overview.
What is CAN Bus and Its Role in Car ECUs?
Imagine the human body’s nervous system – that’s essentially what the CAN bus is for your car. CAN bus, or Controller Area Network, is a robust communication network that allows Electronic Control Units (ECUs) within your vehicle to communicate with each other efficiently without needing a central computer. Think of it as a digital language spoken by your car’s vital components.
In a car, ECUs are like individual organs, each responsible for controlling specific functions – the engine, brakes, transmission, safety systems, and many more. A modern vehicle can house over 70 ECUs, all interconnected via the CAN bus network. This network enables seamless and rapid information sharing, crucial for coordinated operations. For instance, when you hit the brakes, the brake ECU needs to communicate instantly with the engine ECU and transmission ECU for safe and effective deceleration. This real-time communication is facilitated by the CAN bus.
Physically, the CAN bus is a two-wire system, typically a twisted pair of wires known as CAN High and CAN Low. These wires often have color codes for easy identification: CAN High is typically yellow, and CAN Low is green.
Delving Deeper into Car ECUs
Electronic Control Units (ECUs) are the brains behind your car’s various systems. From managing the engine’s performance to controlling the anti-lock braking system (ABS), ECUs are integral to a vehicle’s operation. Each ECU is designed to control a specific set of functions, and in a complex modern car, their numbers can easily exceed 70. These ECUs constantly exchange data over the CAN bus to ensure all systems work in harmony.
Every ECU on the CAN bus has the capability to broadcast information, such as sensor readings or system status. This broadcasted data is available to all other ECUs on the network. Each ECU then assesses this information and decides whether it’s relevant to its operations, choosing to accept or ignore it. This system ensures efficient data distribution and prevents information overload, crucial for real-time decision-making in vehicle control.
Looking closer at the anatomy of an ECU, we find three key components:
- Microcontroller (MCU): This is the central processing unit of the ECU. The MCU interprets incoming CAN messages and determines which messages the ECU should transmit. For example, an oil temperature sensor connected to an ECU might be programmed to send temperature readings over the CAN bus every few milliseconds.
- CAN Controller: Often integrated within the MCU, the CAN controller manages all aspects of CAN communication. It ensures that all transmitted and received messages adhere to the CAN protocol, handling message encoding, error detection, and arbitration. This simplifies the tasks for the MCU, allowing it to focus on the ECU’s core functionalities.
- CAN Transceiver: This component acts as the interface between the CAN controller and the physical CAN bus wires. It converts the data from the CAN controller into the electrical signals that are transmitted over the CAN bus and vice versa. The transceiver also provides essential electrical protection for the ECU, safeguarding it from voltage spikes and other electrical disturbances on the CAN bus.
Connecting to the CAN Bus in Your Car ECU
Connecting to the CAN bus system in your car’s ECU can be achieved through various connectors. While there isn’t a universal standard connector for all CAN bus applications across different vehicles, the DB9 (D-sub9) connector, especially the CANopen CiA 303-1 variant, has emerged as a widely adopted standard. This connector is frequently used for CAN bus data loggers and interfaces, making it a common point of access for diagnostics and data acquisition.
Exploring CAN Bus Variants Relevant to Car ECUs
It’s important to know that CAN technology has evolved into several variants, each with specific characteristics and applications in car ECUs and beyond:
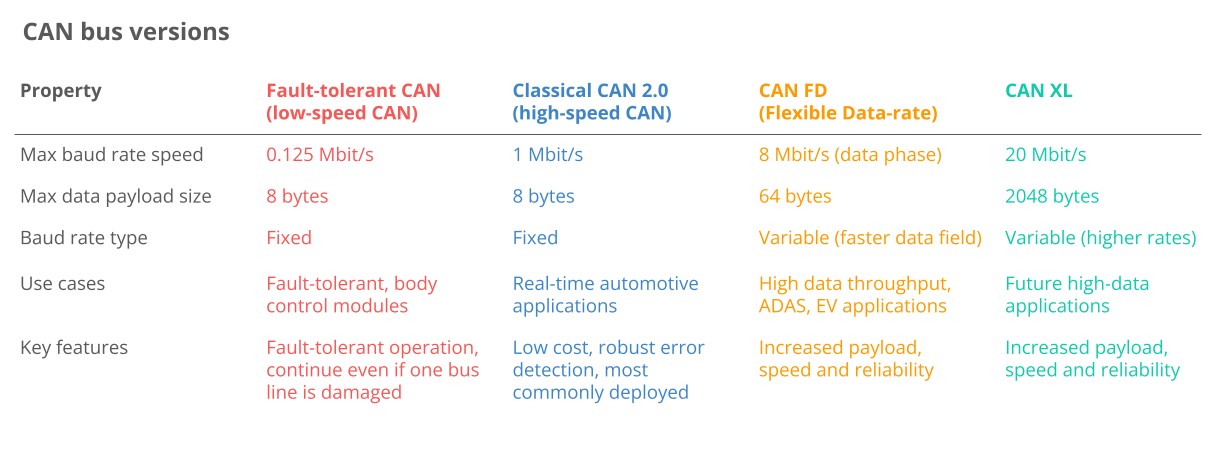
- Low-speed CAN (Fault-tolerant CAN): This variant is designed for applications where fault tolerance is paramount. While it was once a cost-effective solution for critical systems, it’s increasingly being replaced by LIN bus in many automotive applications due to LIN’s lower cost and sufficient performance for less critical functions.
- High-speed CAN (Classical CAN): This is the most prevalent CAN variant in the automotive industry and machinery today. It provides a balance of speed and reliability for a wide range of ECU communications within a vehicle and is the primary focus of this guide.
- CAN FD (CAN with Flexible Data-Rate): CAN FD is an evolution that offers both longer data payloads and faster communication speeds compared to Classical CAN. While it offers performance improvements, its adoption in car ECUs and the broader automotive sector is still growing and hasn’t fully replaced Classical CAN. For more detailed information, you can explore resources dedicated to CAN FD.
- CAN XL (CAN eXtra Large): The latest advancement in CAN technology, CAN XL, aims to bridge the gap between CAN and Automotive Ethernet by offering even larger payloads and faster speeds. It’s designed for future automotive architectures requiring high bandwidth, but its implementation in current car ECUs is still in its early stages.
In addition to CAN, modern vehicles often incorporate other communication networks, each serving specific purposes. Understanding these can provide a broader view of automotive networking:
- LIN Bus (Local Interconnect Network): LIN bus is a more cost-effective communication system used as a supplement to CAN bus. It’s employed for less critical functions within a vehicle, such as window controls, air conditioning, and door locking systems. LIN networks typically consist of a master node and several slave nodes, reducing wiring complexity and cost for non-essential features.
- FlexRay: FlexRay offers higher data rates than CAN, reaching up to 10 Mbit/s, and provides fault tolerance through dual-channel redundancy. While offering enhanced performance and reliability, it’s also more expensive than CAN and is typically used in applications requiring high-speed, fault-tolerant communication, such as advanced chassis control systems.
- Automotive Ethernet: Automotive Ethernet is increasingly being adopted in vehicles to support the high bandwidth demands of advanced driver-assistance systems (ADAS), in-car infotainment, and high-resolution cameras. It provides significantly higher data transfer rates compared to CAN bus but may not offer the same level of real-time performance and robustness crucial for core vehicle control functions traditionally handled by CAN. The future of automotive networking will likely involve a combination of Automotive Ethernet for high-bandwidth applications and CAN FD/CAN XL alongside Classical CAN for critical control functions.
Key Benefits of CAN Bus in Car ECU Systems
The widespread adoption of CAN bus in virtually all modern vehicles and machinery is due to its significant advantages:
Simplicity and Cost-Effectiveness
CAN bus significantly reduces complexity and cost in vehicle wiring. Instead of direct, point-to-point wiring between every component, ECUs communicate via a single CAN bus system. This streamlined approach minimizes errors, reduces vehicle weight, simplifies wiring harnesses, and lowers overall manufacturing costs.
- Reduced Wiring Harness Complexity: Traditional wiring systems necessitate dedicated wires for each connection between nodes. CAN bus, in contrast, uses a shared two-wire system, dramatically reducing the amount of wiring required. This is a stark difference compared to older systems like NMEA 0183, where each device needed its own wiring.
- Weight Reduction: By reducing the amount of copper wiring, CAN bus contributes to significant weight savings in vehicles. Studies show that adopting CAN bus can reduce a vehicle’s wiring harness weight by up to 20 kg. This weight reduction directly translates to improved fuel efficiency and reduced emissions.
- Scalability and Economies of Scale: The massive global adoption of CAN bus has created economies of scale, driving down the costs of CAN components, including controllers, transceivers, connectors, and data acquisition tools. This widespread availability and affordability further reinforce CAN bus as the go-to communication standard.
Enhanced Accessibility and Diagnostics
CAN bus provides a centralized access point for interacting with all ECUs in the network. This “one-point-of-entry” simplifies vehicle diagnostics, data logging, and system configuration.
- Centralized Diagnostic Capabilities: CAN bus architecture allows technicians to connect diagnostic tools at any point on the bus and access communication from all ECUs. This central access simplifies fault detection and troubleshooting, eliminating the need to individually access each ECU.
- Silent CAN Data Logging: CAN bus data loggers can operate in a “silent mode,” passively recording all CAN traffic without interfering with the network’s operation. This is crucial for capturing real-world data for diagnostics and performance analysis without affecting vehicle behavior.
- Efficient ECU Flashing and Updates: Software and firmware updates for ECUs can be efficiently performed over the CAN bus. By transmitting firmware updates as CAN frames, specific ECUs can be reprogrammed without physical access to each unit. This process often utilizes higher-layer protocols like UDS (Unified Diagnostic Services) or CCP/XCP (CAN Calibration Protocol/Universal Measurement and Calibration Protocol).
- Standardization and Interoperability: The automotive industry widely adopts standardized higher-layer protocols built on CAN bus. These standards ensure interoperability between diagnostic tools, ECUs from different manufacturers, and various software applications, streamlining development and maintenance processes.
Exceptional Robustness and Reliability
CAN bus is designed to be exceptionally robust against electrical disturbances and electromagnetic interference (EMI), making it ideal for safety-critical applications in vehicles.
- Differential Signal Transmission: CAN bus uses differential signaling, where data is transmitted as a voltage difference between the CAN High and CAN Low wires. EMI affects both wires equally, and the differential receiver in ECUs effectively cancels out this common-mode noise. This inherent noise immunity ensures reliable communication in electrically noisy automotive environments.
- Comprehensive Error Handling: CAN incorporates sophisticated error detection mechanisms to guarantee data integrity. These include checks for bit errors, stuff errors, CRC errors, form errors, and ACK errors. Upon detecting an error, CAN nodes can automatically request retransmission of corrupted messages, ensuring reliable data delivery.
- Error Confinement for System Stability: CAN nodes are designed to monitor their own error counts. If a node exceeds predefined error thresholds, it can temporarily or permanently disconnect itself from the bus (going into “bus off” state). This error confinement mechanism prevents faulty nodes from disrupting the entire network, enhancing overall system stability.
Communication Efficiency and Prioritization
CAN bus prioritizes messages based on their IDs, ensuring that critical data gets immediate access to the bus. This priority system optimizes bus utilization and avoids data collisions.
- Message Arbitration for Priority: When multiple ECUs attempt to transmit simultaneously, CAN bus employs a non-destructive bitwise arbitration process. The message with the lowest CAN ID (highest priority) wins bus access, while lower-priority messages automatically back off and retry transmission later. This arbitration mechanism ensures that critical messages, such as braking signals, are transmitted without delay.
- Efficient Bandwidth Utilization: The arbitration process maximizes CAN bus bandwidth utilization. Lower-priority messages can efficiently use the bus bandwidth in the intervals between high-priority message transmissions, optimizing overall communication throughput.
- Sufficient Speed for Automotive Applications: While Classical CAN’s speed might seem modest compared to technologies like Automotive Ethernet, it provides ample bandwidth for the vast majority of automotive and industrial control applications. A single 1 Mbit/s CAN bus can handle thousands of CAN frames per second, sufficient for real-time control and data acquisition in most vehicle systems.
A Brief History of CAN Bus in Automotive Technology
- Pre-CAN Era: Before CAN bus, car ECUs relied on complex and expensive point-to-point wiring systems, making vehicle electronics increasingly cumbersome and less reliable.
- 1986: Bosch’s Innovation: Robert Bosch GmbH developed the CAN protocol to address the growing wiring complexity in vehicles and provide a more efficient and reliable communication system.
- 1991: CAN 2.0 Standard: Bosch released CAN 2.0, which defined two message formats: CAN 2.0A with 11-bit identifiers and CAN 2.0B with 29-bit identifiers, expanding addressing capabilities.
- 1993: International Standardization: CAN was adopted as an international standard under ISO 11898, solidifying its position as a globally recognized communication protocol.
- 2003: ISO 11898 Series: ISO 11898 evolved into a series of standards, further detailing various aspects of CAN implementation and physical layer specifications.
- 2012: CAN FD Introduction: Bosch released CAN FD 1.0, introducing flexible data rates and larger payloads to meet increasing data bandwidth demands.
- 2015: CAN FD Standardization: The CAN FD protocol was standardized under ISO 11898-1, paving the way for wider adoption in automotive and industrial applications.
- 2016: Physical Layer for Higher Speeds: ISO 11898-2 standard was updated to define the physical layer for CAN FD, supporting data rates up to 5 Mbit/s (and in practice, up to 8 Mbit/s).
- 2018: CAN XL Development: CiA (CAN in Automation) initiated the development of CAN XL to address future high-bandwidth requirements.
- 2024: CAN XL Standardization: CAN XL was standardized under ISO 11898-1:2024 and 11898-2:2024, setting the stage for its deployment in advanced automotive and industrial systems.
Today, CAN is the dominant communication network in automobiles (cars, trucks, buses), as well as in ships, airplanes, electric vehicle batteries, industrial machinery, and numerous other applications.
The Future Trajectory of CAN Bus in Car ECUs
Looking ahead, CAN bus is expected to remain a vital technology, although it will be influenced by key trends in the automotive industry:
- Increasing Demand for Bandwidth: The growing complexity of vehicle systems, driven by ADAS, autonomous driving, and advanced infotainment, is pushing the need for higher data communication rates. This demand may accelerate the transition towards CAN FD, CAN XL, and Automotive Ethernet in certain vehicle domains.
- Connected Vehicles and Cloud Integration: The rise of connected vehicles and vehicle telematics is creating new opportunities for cloud-based services like predictive maintenance, remote diagnostics, and over-the-air updates. However, this connectivity also introduces cybersecurity challenges that need to be addressed to protect vehicle systems and data.
- Openness vs. Proprietary Data Access: The push for “Open Source” technologies and “Right to Repair” initiatives may contrast with OEMs’ desire to maintain proprietary control over vehicle data for subscription-based services and data monetization. This tension will shape how vehicle data is accessed and utilized in the future.
It’s important to note that the transition from Classical CAN to newer technologies is likely to be gradual. Despite the emergence of CAN FD and Automotive Ethernet, Classical CAN remains deeply entrenched in existing vehicle architectures and will continue to play a significant role for the foreseeable future. While CAN FD has seen increasing adoption, CAN XL is still in the early stages of deployment. Automotive Ethernet is making inroads in specific high-bandwidth domains, but Classical CAN’s robustness, cost-effectiveness, and established ecosystem ensure its continued relevance in car ECU communication for many years to come.
Get Your In-Depth CAN Bus Guide
Want to deepen your CAN bus expertise?
Access our comprehensive “Ultimate CAN Guide” in a 160+ page PDF, covering 12 essential introductory topics.
Download now
Technical Foundations: CAN Physical and Data Link Layers
From a technical perspective, CAN bus operation is defined by two critical layers within the OSI model: the data link layer and the physical layer. For high-speed CAN, ISO 11898-1 specifies the data link layer, while ISO 11898-2 defines the physical layer.
Within the 7-layer OSI model framework, CAN bus effectively encompasses the two lowest layers, handling the fundamental aspects of data transmission and physical signaling.
Physical Layer (ISO 11898-2)
The CAN bus physical layer standard (ISO 11898-2) defines the hardware aspects of the network, including cable specifications, electrical signal levels, node impedance requirements, and termination. Key aspects of the physical layer include:
- Baud Rate: Specifies the data transmission speed. Classical CAN supports baud rates up to 1 Mbit/s, while CAN FD extends this to 8 Mbit/s. All nodes on a CAN bus must operate at the same baud rate for successful communication.
- Cable Length: Maximum permissible cable length is inversely related to the baud rate. Longer cable lengths are possible at lower baud rates. For example, at 125 kbit/s, the maximum length can be up to 500 meters, while at 1 Mbit/s, it reduces to around 40 meters.
- Termination: Proper termination is crucial for signal integrity. CAN bus networks must be terminated at each end of the bus with a 120 Ohm resistor to prevent signal reflections and ensure reliable communication.
Data Link Layer (ISO 11898-1)
The CAN bus data link layer, as defined by ISO 11898-1, is responsible for data framing, error handling, transmission protocols, and ensuring data integrity. Key functions of the data link layer include:
- Frame Formats: CAN defines four frame types: data frames (for transmitting data), remote frames (for requesting data), error frames (for signaling errors), and overload frames (for managing bus traffic). Standard and extended frame formats with 11-bit and 29-bit identifiers, respectively, are also defined.
- Error Handling Mechanisms: The data link layer incorporates robust error detection and handling mechanisms, including Cyclic Redundancy Check (CRC), acknowledgement slots, and error counters. These features ensure high data integrity and network reliability.
- Arbitration Process: The non-destructive bitwise arbitration mechanism is implemented in the data link layer. This priority-based arbitration ensures that higher-priority messages (with lower CAN IDs) gain bus access without causing data collisions, critical for real-time control applications.
Understanding the CAN Frame Structure
Communication over the CAN bus occurs through CAN frames, which are structured message formats defined by the data link layer.
The standard CAN data frame, using an 11-bit identifier (CAN 2.0A) common in automotive applications, consists of several fields, each playing a specific role. The extended 29-bit identifier frame (CAN 2.0B), used in protocols like J1939 for heavy-duty vehicles, shares a similar structure but with a longer identifier field.
The CAN ID and Data fields are particularly important when logging and analyzing CAN bus data, as they contain the message identifier and the actual payload data.
- SOF (Start of Frame): Marks the beginning of a CAN frame with a dominant ‘0’ bit, signaling the start of a new transmission to all nodes on the bus.
- ID (Identifier): The CAN ID is a crucial field that serves two purposes: it identifies the message content and determines its priority. Lower numerical IDs have higher priority in bus arbitration.
- RTR (Remote Transmission Request): A bit that distinguishes between data frames and remote frames. In data frames, RTR is dominant ‘0’, indicating data transmission. In remote frames, RTR is recessive ‘1’, requesting data from another node.
- Control Field: Contains the IDE (Identifier Extension Bit), which is ‘0’ for 11-bit IDs and ‘1’ for 29-bit IDs. It also includes the 4-bit DLC (Data Length Code), specifying the number of data bytes (0-8) in the data field.
- Data Field: Contains the actual payload data, ranging from 0 to 8 bytes. This data field carries the CAN signals representing sensor readings, control commands, or status information.
- CRC (Cyclic Redundancy Check): A 15-bit CRC checksum calculated over preceding frame fields. This ensures data integrity by allowing detection of transmission errors.
- ACK (Acknowledgement Slot): Consists of the ACK slot and ACK delimiter. During transmission, the ACK slot is recessive ‘1’. If a receiving node correctly receives the frame, it overwrites the ACK slot with a dominant ‘0’, acknowledging successful reception.
- EOF (End of Frame): Marks the end of the CAN frame with a sequence of 7 recessive ‘1’ bits, indicating the conclusion of the transmission.
CAN defines four distinct frame types to handle various communication needs:
- Data Frame: The most common frame type, used to transmit data from a sender ECU to one or more receiving ECUs. It contains all the fields described above, including the data payload. In typical CAN bus applications, data frames constitute the vast majority of network traffic.
- Error Frame: Used by a CAN node to signal the detection of an error during communication. It consists of an error flag and error delimiter. Error frames are crucial for network-wide error signaling and triggering error handling procedures. Analyzing error frames can be valuable in diagnosing communication issues within a CAN bus system.
- Remote Frame: A node uses a remote frame to request specific data from another node. It has a similar structure to a data frame but lacks a data field, and the RTR bit is set to ‘1’. Remote frames are less commonly used in modern CAN applications. Higher-layer protocols often utilize data frames for data requests and responses, making remote frames less necessary.
- Overload Frame: Used to introduce extra delay between data frames or remote frames. A node may transmit an overload frame if it requires additional time to process the preceding frame. Overload frames are rarely used in practice. Modern CAN controllers and network designs typically minimize the need for overload frames, ensuring efficient bus utilization.
CAN bus incorporates robust error handling. When an erroneous CAN frame is detected, nodes automatically take action. This error handling is managed through CAN error counters within each node. These counters track transmit and receive errors, and based on these counts, a node’s state can change (active, passive, bus off). This mechanism ensures that problematic nodes are gracefully isolated from the bus to prevent further errors and network disruption. For a deeper understanding, refer to resources specifically detailing CAN bus error handling.
Higher-Layer Protocols in Car CAN Networks
CAN bus, being a lower-layer protocol, provides the foundation for communication but lacks specifications for handling messages larger than 8 bytes or interpreting raw data. To address these limitations, higher-layer protocols are essential for defining how data is structured and interpreted within a CAN network.
These higher-layer protocols build upon the CAN bus framework to provide standardized methods for communication, diagnostics, network management, and application-specific functionalities.
Below are some of the most common higher-layer protocols used in automotive and industrial CAN networks:
OBD2 (On-Board Diagnostics II)
OBD2 is a standardized protocol primarily used for vehicle diagnostics, emission testing, and maintenance. It defines diagnostic trouble codes (DTCs) to report vehicle faults and provides access to real-time data parameters like speed, RPM, engine temperature, and emission-related information. OBD2 is mandatory in most modern cars and light trucks and provides a standardized interface for accessing vehicle diagnostic data.
UDS (Unified Diagnostic Services)
UDS (ISO 14229) is a comprehensive diagnostic protocol used in automotive ECUs for advanced diagnostics, ECU reprogramming (flashing), routine testing, and secure access. UDS provides a standardized set of diagnostic services, allowing for in-depth ECU interrogation, fault management, and software updates. It’s widely used in vehicle development, manufacturing, and after-sales service.
CCP/XCP (CAN Calibration Protocol/Universal Measurement and Calibration Protocol)
CCP and XCP are protocols used for ECU calibration, measurement, and bypassing. They enable read and write access to ECU memory for parameter tuning, data acquisition, and rapid prototyping. XCP, the successor to CCP, supports higher data rates and communication flexibility, including CAN, Ethernet, and other physical layers. These protocols are essential tools in ECU development and calibration processes.
CANopen
CANopen (CiA 301) is a widely used protocol in industrial automation, embedded control systems, and robotics. It provides a standardized framework for device communication, network management, and device configuration. CANopen defines device profiles and communication objects, enabling interoperability between devices from different manufacturers. It’s commonly used in applications requiring real-time control and distributed intelligence.
SAE J1939
J1939 is a protocol standard specifically designed for heavy-duty vehicles, including trucks, buses, agricultural equipment, and construction machinery. It defines communication parameters for engine control, transmission, braking systems, and other vehicle subsystems. J1939 uses Parameter Groups (PGNs) and Suspect Parameter Numbers (SPNs) to organize and identify data parameters, such as speed, engine temperature, and pressure readings.
NMEA 2000
NMEA 2000 is a communication standard used in the marine industry for interconnecting marine electronic devices, such as GPS receivers, depth sounders, autopilots, and engines. Based on CAN bus, NMEA 2000 is closely related to J1939 and shares similar concepts. It provides a plug-and-play network for marine electronics, simplifying system integration and data sharing on boats and ships.
ISOBUS (ISO 11783)
ISOBUS, standardized as ISO 11783, is used in agricultural and forestry machinery. It enables interoperability between tractors, implements, and farm management systems. ISOBUS allows for plug-and-play connection of implements from different manufacturers, standardizing communication for control, diagnostics, and data exchange in agricultural operations. It’s closely aligned with J1939 in its technical foundations.
Understanding the relationship between CAN bus and higher-layer protocols is key to working with automotive and industrial communication systems.
To illustrate this, consider human communication:
In this analogy, CAN bus is like the basic ability to speak and hear, providing the physical means of communication. Higher-layer protocols are like different languages (English, German, etc.). They use the basic communication framework (CAN bus) to create structured and meaningful conversations (data exchange).
Key takeaways from this analogy:
- Higher-Layer Protocol is Always Necessary: Just as human communication requires a language, CAN bus communication always relies on a higher-layer protocol to give meaning to the raw data transmitted. Without a protocol, CAN data is just meaningless bits.
- Variety of Protocols: Similar to the diversity of human languages, numerous higher-layer CAN protocols exist, each designed for specific applications. Besides the common ones listed, many proprietary or custom protocols are used for specific manufacturers or applications.
- Data Recording vs. Interpretation: A voice recorder can capture any conversation, regardless of the language. Similarly, a CAN bus data logger records raw CAN traffic. However, to understand the recorded data, you need to know the language (higher-layer protocol) used.
- Multiple Protocols on One Bus: A car might use a proprietary CAN protocol for internal ECU communication, but also support OBD2 for standardized diagnostics on the same CAN bus. This is like being able to speak your native language and also using English for international communication.
- Interoperability through Standards: Standardized higher-layer protocols like J1939 or CANopen enable interoperability. If you understand the protocol, you can interact with any device or system using that protocol, regardless of the manufacturer.
Other commonly encountered higher-layer CAN protocols include:
- ARINC 825: Used in aerospace applications.
- UAVCAN: An open-source protocol for unmanned aerial vehicles (drones) and robotics.
- DeviceNet: Used in industrial automation, particularly in North America.
- SafetyBUS p: For safety-critical industrial applications.
- MilCAN: Designed for military vehicles and harsh environments.
- HVAC CAN: For Heating, Ventilation, and Air Conditioning (HVAC) systems.
Step-by-Step Guide to Logging CAN Bus Data from Car ECUs
Logging CAN bus data is essential for diagnostics, reverse engineering, performance analysis, and various other applications. Here’s a step-by-step guide:
Step 1: Selecting the Appropriate CAN Bus Logging Hardware
Choosing the right hardware is the first critical step. Consider your specific needs:
Explore our 5-minute intro to CANedge or our webinar on CAN logging for more insights.
Step 2: Identifying the Correct Adapter Cable for Car ECU Access
Selecting the right adapter cable depends on the vehicle and the CAN bus connector type. Here are common options:
OBD2 Adapter
For most modern cars and some light-duty vehicles, an OBD2 adapter is often used. It allows access to OBD2 diagnostic data and, in some cases, the vehicle’s proprietary CAN bus data.
J1939 Adapter
For heavy-duty vehicles (trucks, buses, etc.), a J1939 adapter is typically used to access J1939 protocol data.
M12 Adapter
In marine applications and some industrial machinery, an M12 adapter may be needed to connect to CANopen or NMEA 2000 networks.
Contactless CAN Reader
A contactless CAN reader offers a universal option, allowing you to read CAN data by inductively coupling to the CAN High and CAN Low wires, without needing a specific connector.
Choosing the right adapter may vary depending on the vehicle type and your specific goals:
Cars
For logging data from cars, the OBD2 adapter is often the starting point. It enables access to standardized OBD2 data (RPM, speed, etc.) in most post-2008 non-EV cars. For electric vehicles (EVs) or accessing more in-depth data, UDS requests via OBD2 might be possible. To reverse engineer proprietary CAN data, the OBD2 port might provide access, but in cases where it doesn’t, a contactless CAN reader becomes necessary.
Heavy-Duty Vehicles
In heavy-duty vehicles, the J1939 adapter is commonly used. If a 9-pin Deutsch J1939 connector is present, this adapter is suitable. However, some brands use different connectors, like Caterpillar’s 9-pin connector, requiring a Caterpillar adapter. Having both a J1939 adapter and a contactless CAN reader is recommended for broader compatibility. For accessing two CAN buses through a single J1939 connector, a J1939-DB9/DB9 adapter can be used. Some trucks, like Volvo, may offer J1939 access via the OBD2 port, making an OBD2-DB9/DB9 adapter useful.
Marine Vessels
For marine vessels, the M12 connector is frequently used for accessing NMEA 2000 data. For engine-specific data, J1939 or DT06 adapters might be needed.
Industrial Machinery
In industrial machinery outside of automotive, the M12 adapter is often applicable. A standard DB9 connector might also be encountered, but verify it’s for CAN bus and not RS232.
Agriculture
In tractors, a J1939 adapter is typically used for J1939 data. For ISOBUS data alongside J1939, a J1939-DB9/DB9 adapter (H+J) can be used. Alternatively, an in-cab adapter can access the ISOBUS network.
Labs and Test Benches
In lab environments, a generic adapter with open wires simplifies connections to power and CAN buses. Open-wire adapters are also helpful for creating custom adapters when off-the-shelf options are insufficient.
Universal Option
Regardless of the application, a contactless CAN reader can always be considered. It provides a non-invasive way to tap into CAN High/Low wires. While versatile, installation might be more involved as it requires physical access to wiring. Also, contactless readers are typically read-only and might need external power.
Modern vehicles often have multiple CAN buses and potentially other automotive network types like LIN, FlexRay, or Automotive Ethernet. Heavy-duty vehicles may have several CAN buses (2-3 in trucks, >8 in mining vehicles). When logging data, consider the need to connect to multiple CAN buses to capture all relevant information. Many CAN loggers support multi-channel logging with time synchronization. The CANedge, for example, can log two CAN channels simultaneously, and with a CANmod.router, up to five channels.
Step 3: Configuring and Connecting Your Logging Device
Before connecting, ensure:
- Baud Rate: The logger’s baud rate matches the CAN bus. Some loggers, like CANedge, can auto-detect the baud rate.
- Request Messages: For on-request data like OBD2/UDS, configure the logger to send the necessary request messages.
Connect your device and verify data logging. If issues arise, consult troubleshooting guides (see illustration).
Step 4: Reviewing Raw CAN Bus Data
After logging, review the log file. Raw CAN data is not human-readable. Software like asammdf displays data in a tabular format, showing timestamped CAN frames with IDs and payloads.
Try it yourself: Download asammdf and our sample data.
Decoding Raw CAN Data into Physical Values for Car ECU Analysis
Raw CAN data requires decoding to be understandable. This involves converting CAN frames into physical values (km/h, degrees Celsius, etc.). A DBC file and decoding software are essential for this process.
Step 1: Understanding CAN Signal Extraction
CAN frames contain CAN signals within their data payload. To extract a signal’s physical value, you need:
- Byte Order (Endianness): Intel (Little-Endian) or Motorola (Big-Endian).
- Bit Start: Starting bit position of the signal.
- Bit Length: Signal length in bits.
- Offset: Value to add to the raw signal.
- Scale Factor: Value to multiply the raw signal by.
Signal extraction involves carving out the relevant bits, converting to a decimal value, and applying scaling and offset.
Step 2: Obtaining the Relevant DBC File for Car ECU Data
A CAN DBC file (CAN database) is a text file containing the decoding rules for CAN data.
How to get a DBC file?
DBC files are often proprietary and OEM-specific.
-
OEM Engineers: Usually have access to DBC files or the information to create them.
-
Standardized Protocols: For protocols like J1939, NMEA 2000, OBD2, and CANopen, standardized DBC files or examples may be available.
-
Reverse Engineering: If DBC files are unavailable, reverse engineering CAN data is an option, but it’s time-consuming.
Step 3: Using Software/API Tools for Decoding
You’ll need software or APIs that support your log file format and DBC files. Examples for CANedge users:
asammdf GUI
asammdf GUI is a desktop tool suitable for ad hoc analysis, diagnostics, and data export.
Grafana Dashboards
Grafana dashboards enable custom data visualization, reporting, and sharing insights.
MATLAB/Python
MATLAB and Python scripting tools are powerful for statistical analysis and big data processing of CAN data.
Common Use Cases for CAN Bus Data Logging in Cars
CAN bus data logging has diverse applications:
Car Data Logging and Streaming
Logging OBD2 data from cars can be used for fuel efficiency improvement, driving behavior analysis, prototype testing, and insurance telematics. Learn more about OBD2 logging.
Heavy-Duty Vehicle Fleet Telematics
J1939 data from trucks and buses is valuable for fleet management to optimize costs and enhance safety. Explore J1939 telematics applications.
Predictive Maintenance
IoT CAN loggers enable remote monitoring of vehicles and machinery for predictive maintenance, reducing downtime and preventing breakdowns. Discover predictive maintenance solutions.
Vehicle/Machine Black Box Recording
CAN loggers can function as “black boxes” in vehicles and equipment, providing crucial data for incident analysis and diagnostics. Learn about CAN bus black box applications.
Do you have a CAN logging application in mind? Contact us for expert advice!
Contact us
Explore our guides section for more introductory articles or download the comprehensive Ultimate Guide PDF.
Need to start logging or streaming CAN bus data?
Get your CAN logger today!
Buy now Contact us
Recommended for you
J1939 DATA LOGGER & TELEMATICS
OBD2 DATA LOGGER – LOG VEHICLE DATA
[